Dheeraj Vattikonda
M.Sc. Student, McGill University & Mila
About Me
I work on reinforcement learning and reasoning with LLM agents in the Long Horizon Agents team under Massimo Caccia at ServiceNow AI Research, based out of Montreal. I am also a Master's student at McGill University and Mila under the guidance of Xue (Steve) Liu.
My current research revolves around reasoning in LLM web agents and tool-calling systems. My recent work on web agent training received an oral presentation at ICML and will appear at NeurIPS 2025.
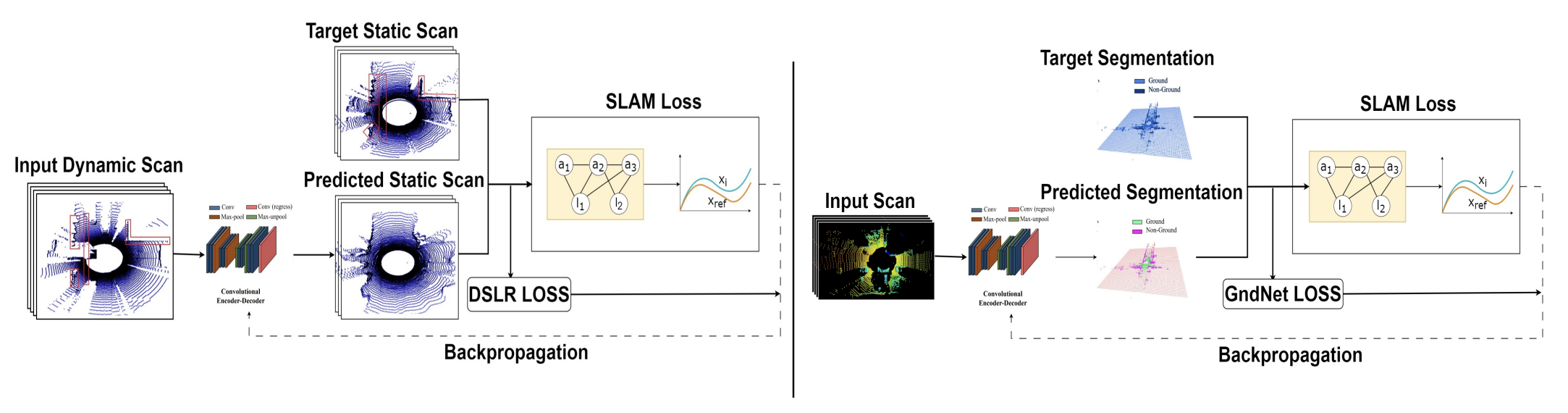
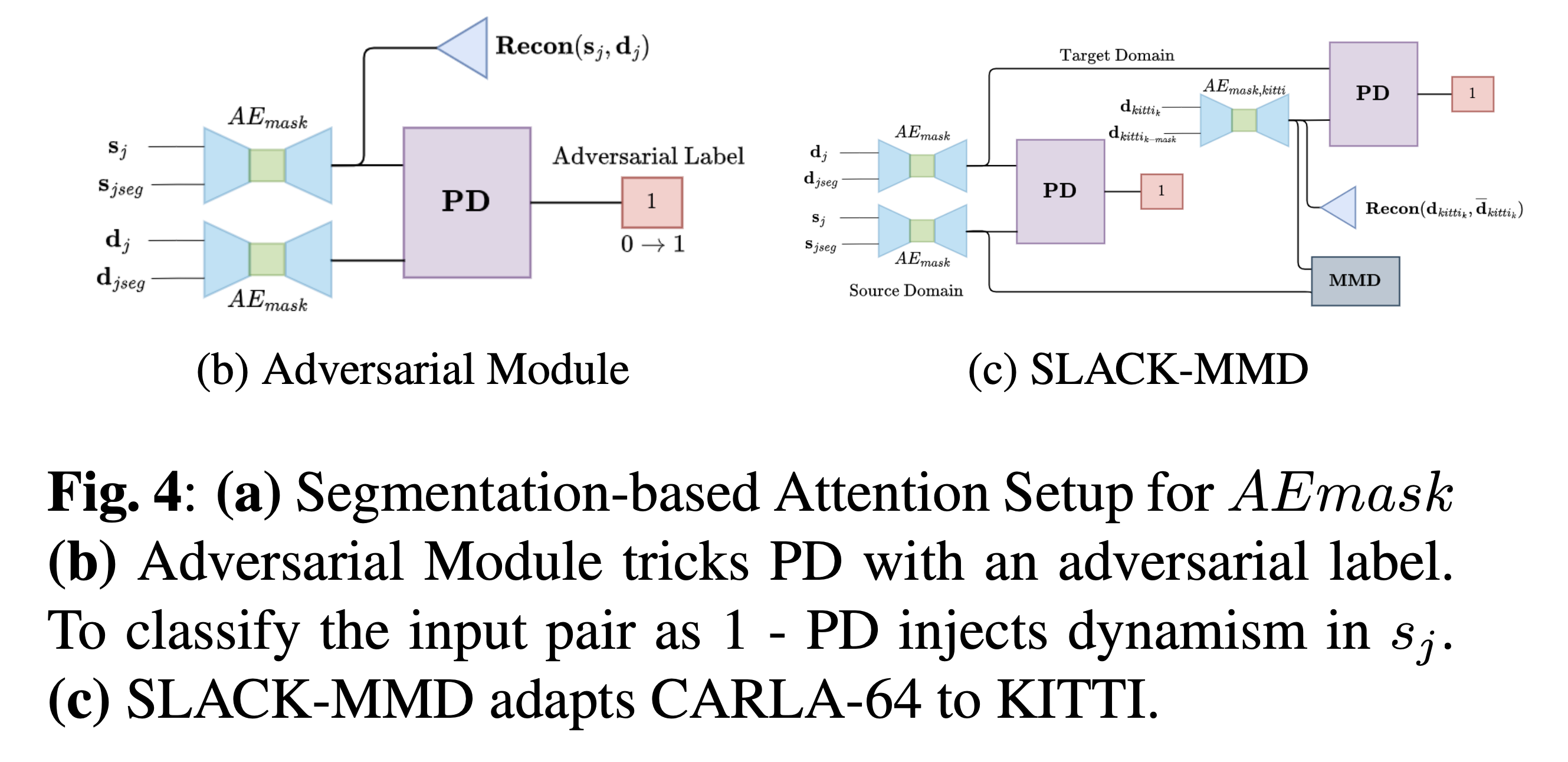
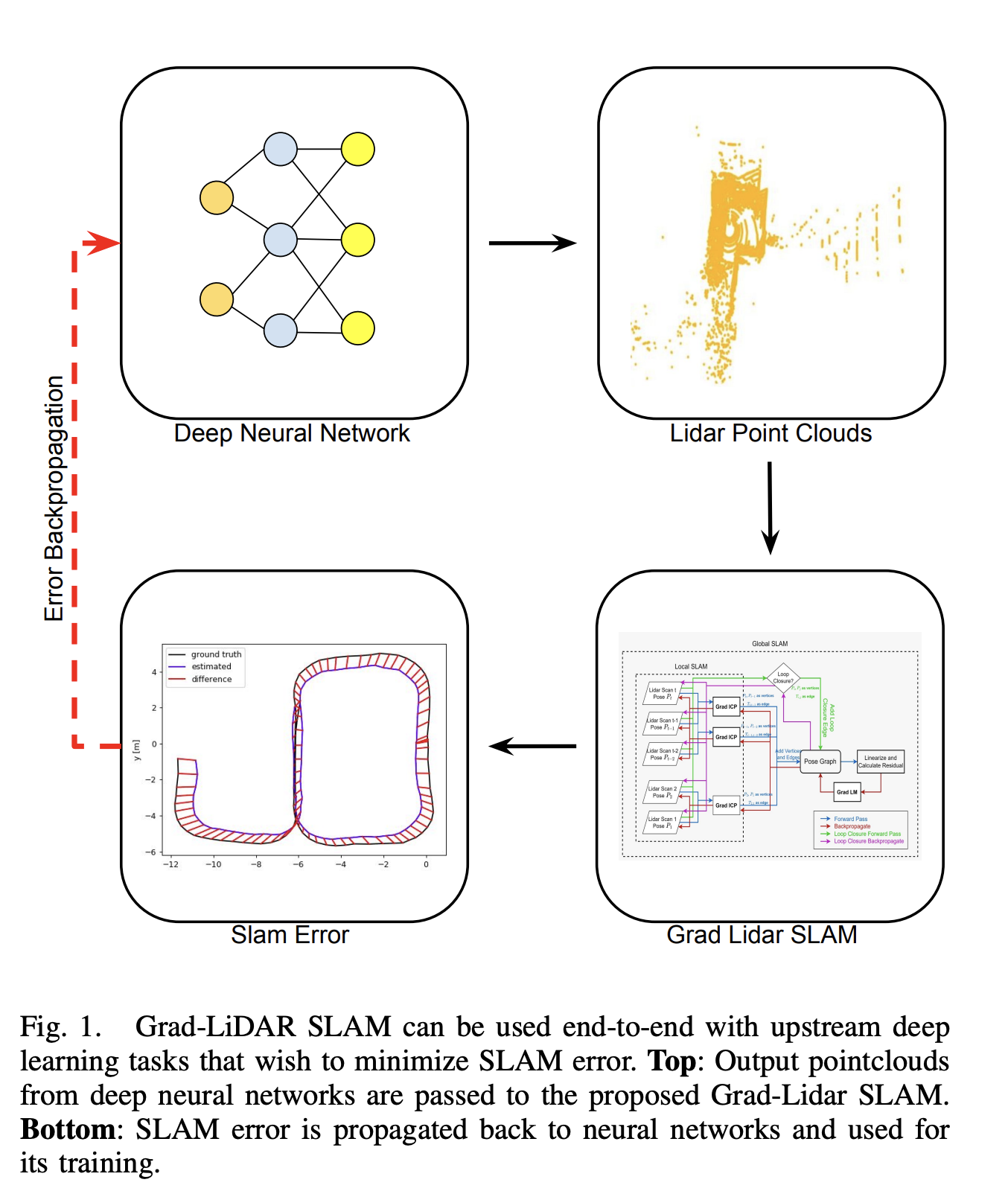
I completed my Bachelor's in Electronics and Communication Engineering at NIT Hamirpur, where I worked on robot perception, focusing on differentiable SLAM systems and LiDAR-based perception tasks for autonomous navigation.
News
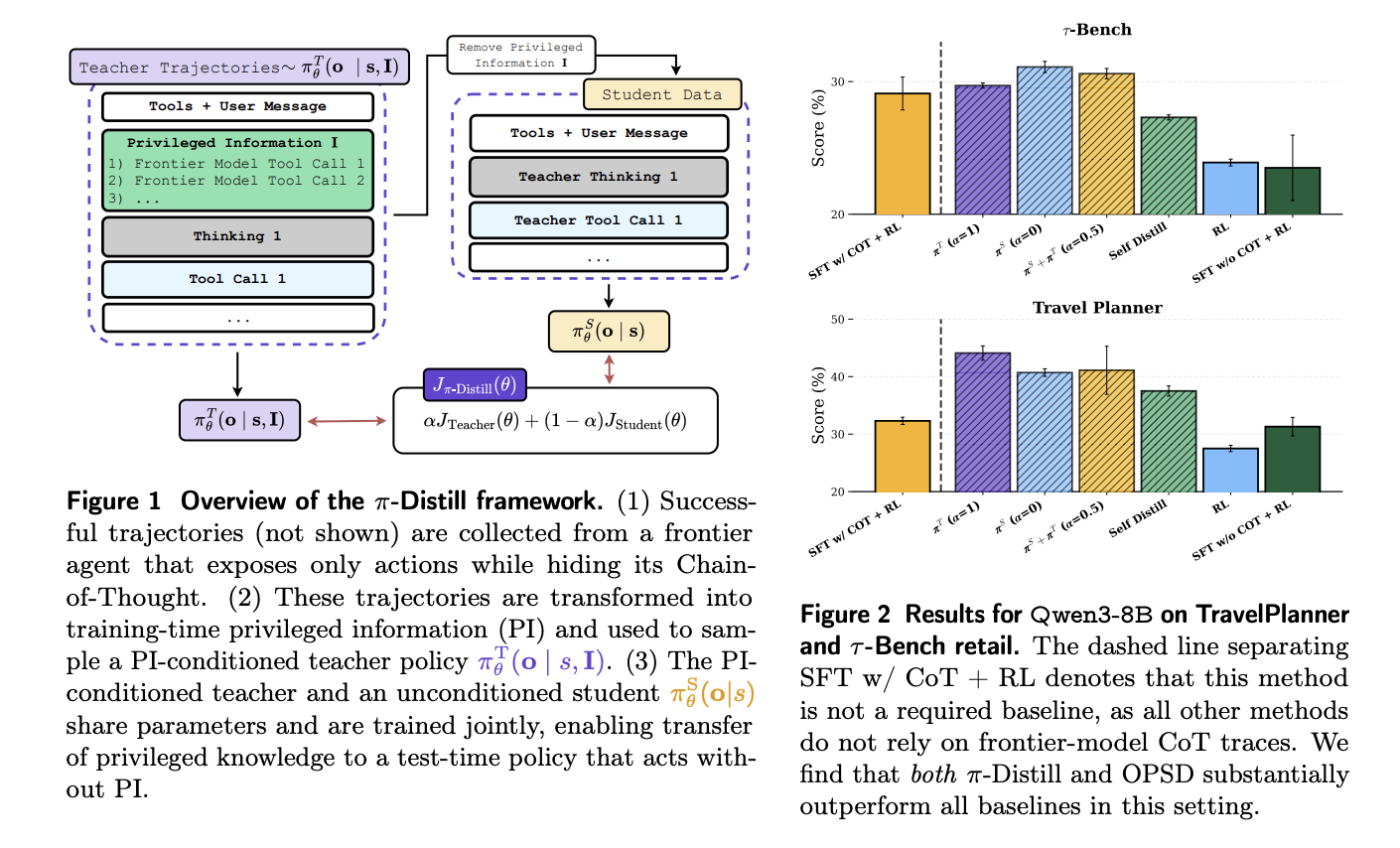
- Feb 2026 New paper: π-Distill — Privileged Information Distillation for Language Models
- 2025 Oral presentation at ICML 2025 CUA Workshop
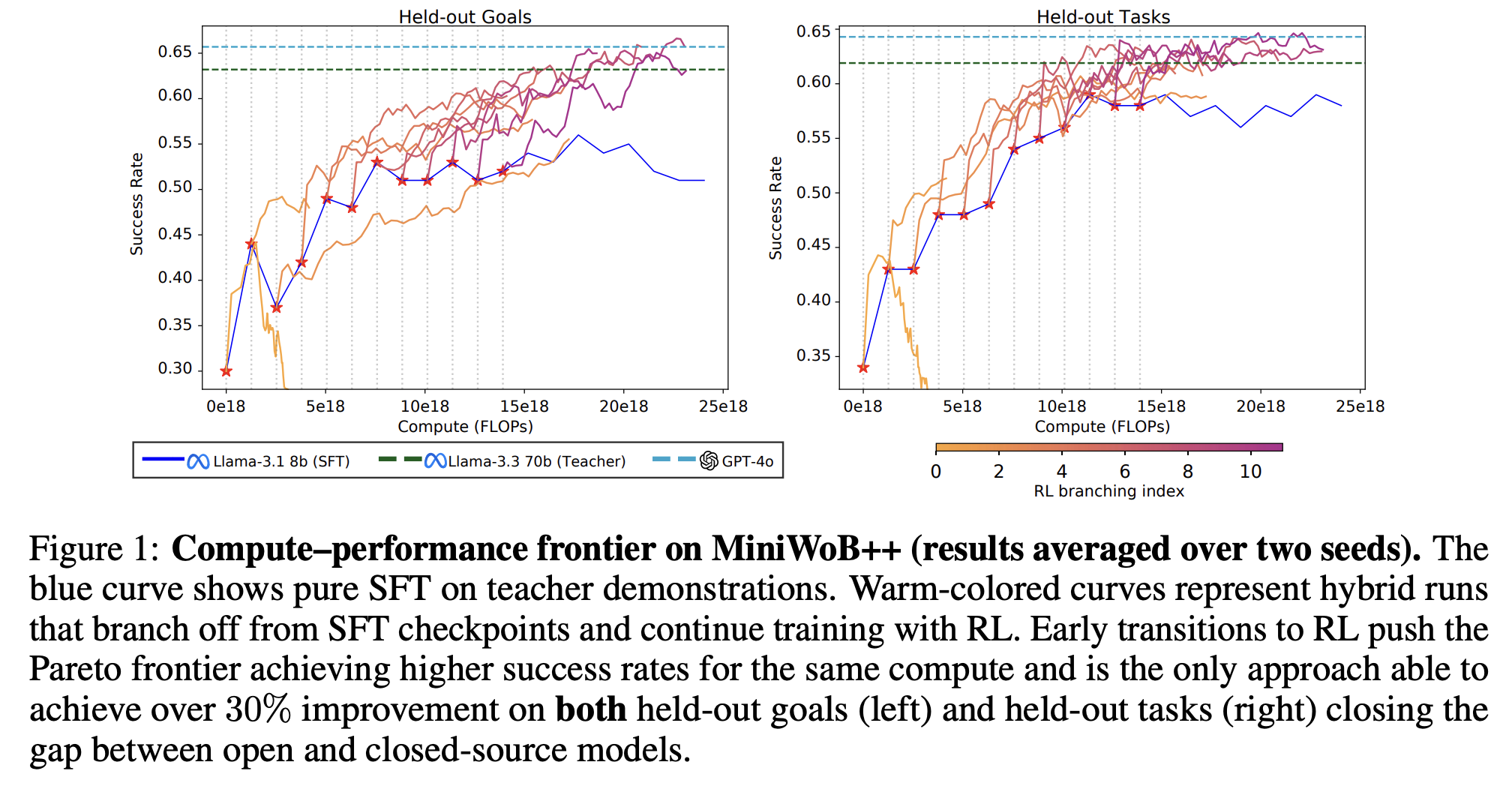
- 2025 "How to Train Your LLM Web Agent" accepted at NeurIPS 2025
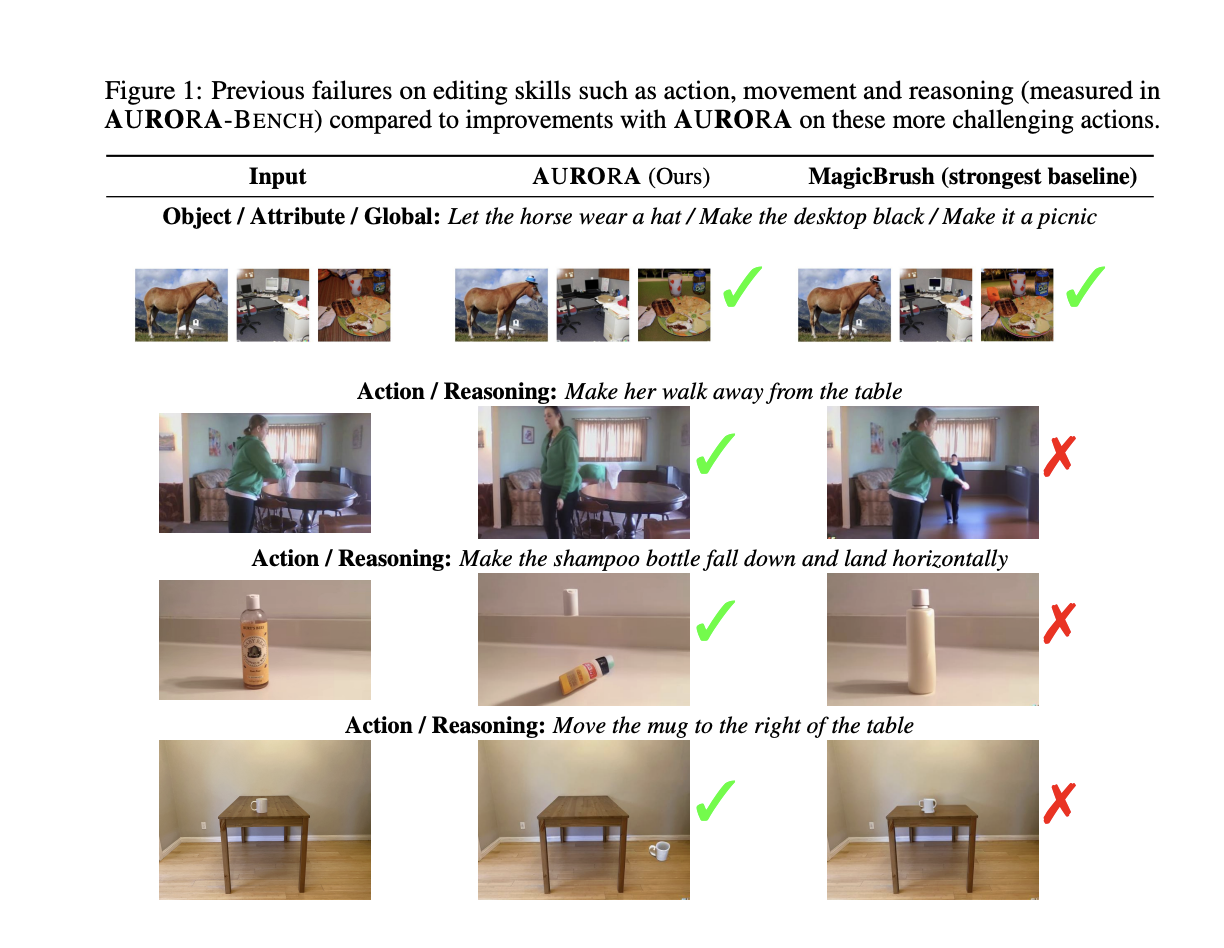
- 2024 Aurora accepted as Spotlight at NeurIPS 2024
- Aug 2024 Started as Visiting Researcher at ServiceNow AI Research
- Aug 2023 Started M.Sc. at Mila / McGill University
Selected Publications